毫米波雷达-AWR2243
简介
毫米波雷达,是工作在毫米波波段(Millimeter Wave )探测的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光学雷达的一些优点。
同厘米波雷达相比,毫米波雷达具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学雷达相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波雷达的抗干扰、反隐身能力也优于其他微波雷达 。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好,在战场上生存能力强 。
目前在自动驾驶,智能监控领域广泛运用。毫米波雷达能直接获取目标的距离,速度,角度等基本信息。通过对数据的进一步处理,对目标的尺寸,轮廓可能也有一定的估计能力。
1 调频连续波(FMCW)
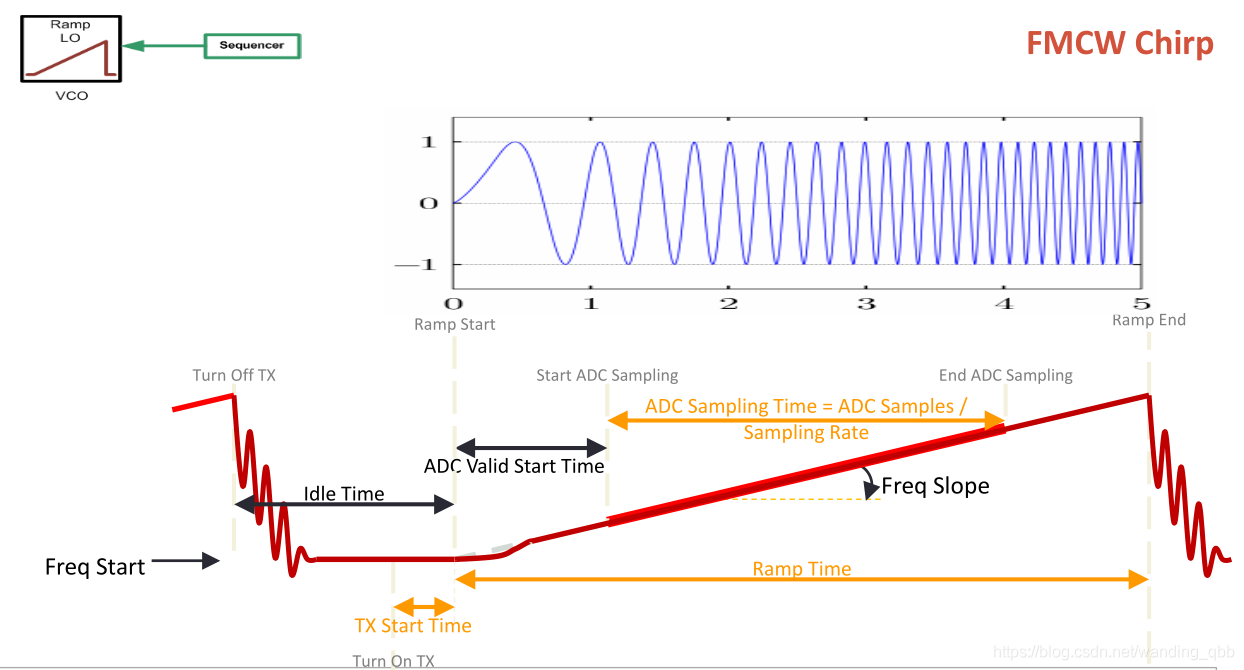
调频连续波(Frequency-Modulated Continuous Wave),是一组幅值不变,但频率变化的连续波形,毫米波雷达使用的调频连续波是频率线性增加的正弦波,又叫线性调频连续波。
如下图的蓝色波形所示,横坐标是时间,横坐标是幅度,波的频率从起始频率逐渐增加到截至频率。这个过程称为一个Chirp(脉冲,啁啾)。
下方红色图,横坐标是时间,纵坐标是频率,更能直观的看出在每个Chirp中频率在线性增加,之后经过一个空闲时间迅速降到起始频率,开始下一个Chirp。
1.1、为什么毫米波雷达使用FMCW
由于线性调频波频率是随时间变化的,当毫米波发射出去,被远处的物体反射回来,可以很容易的根据回波的频率判断出波从发射到接收所经过的时间,从而根据电磁波的传播速度估算物体的距离。
很容易想到,能够测距离自然就能测速度,测量两次距离除以两次测量的时间就是速度。
进一步分析,可以发现角度也是可以通过距离计算出来的,通过多个雷达对同一目标的距离测量,可以根据细微的距离差,计算出目标的角度。
以上只是简单说明毫米波雷达测量距离,速度,角度的基本原理,下面将详细介绍雷达工作的各个细节,以及如何来设计FMCW,来满足自己对距离,速度,角度的分辨率要求,最大测量范围要求。
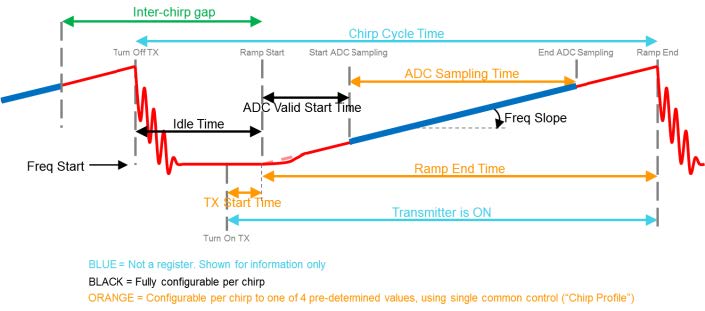
1.2、FMCW的基本参数
c h i r p chirp c hi r p
s t a r t F r e q startFreq s t a r tF r e q
i d l e T i m e idleTime i d l e T im e
r a m p E n d T i m e rampEndTime r am pE n d T im e
T c T_c T c T c = i d l e T i m e + r a m p E n d T i m e T_c = idleTime + rampEndTime T c = i d l e T im e + r am pE n d T im e
f r e q S l o p ( S ) freqSlop(S) f r e q S l o p ( S )
A D C S a m p l e s ( N ) ADCSamples(N) A D C S am pl es ( N )
s a m p l e R a t e ( F s ) sampleRate(F_s) s am pl e R a t e ( F s )
A D C S a m p l i n g T i m e ( T s ) ADCSamplingTime(T_s) A D C S am pl in g T im e ( T s ) T s = N / F s , A D C S a m p l i n g T i m e = A D C S a m p l e s / s a m p l e R a t e T_s = N/F_s, ADCSamplingTime = ADCSamples/sampleRate T s = N / F s , A D C S am pl in g T im e = A D C S am pl es / s am pl e R a t e
B B B B = S ∗ T s = S ∗ N / F s = f r e q S l o p ∗ A D C S a m p l e s / s a m p l e R a t e B = S * T_s = S * N/F_s = freqSlop * ADCSamples/sampleRate B = S ∗ T s = S ∗ N / F s = f r e q S l o p ∗ A D C S am pl es / s am pl e R a t e
p e r i o d i c i t y ( T s ) periodicity(T_s) p er i o d i c i t y ( T s )
上面各参数的名称为代码中常使用的命名方式,括号内的简写便于后面推导公式使用。
1.2、距离
雷达的基本构造如下图所示:1. 频率合成器;2. 发射雷达;3. 接收雷达;4.混频器。
频率合成器用于生产线性调频波(FMCW),之后通过发射雷达发射,雷达信号被目标反射后通过接收雷达接收信号,之后通过混频器生成发射信号和接收信号的差频信号(IF信号)。
差频信号(IF信号)的频率和距离正相关,如果距离为0,信号发射出去后立即反射接收,差频信号(IF信号)频率为0,距离越远,差频信号(IF信号)的频率越高。
推导距离与IF信号的关系表达式:
调频连续波斜率变化为 S S S Δ t \Delta t Δ t f I F = S ∗ Δ t f_{IF} = S * \Delta t f I F = S ∗ Δ t Δ t \Delta t Δ t Δ t = 2 ∗ d / c \Delta t = 2*d/c Δ t = 2 ∗ d / c 3.0 ∗ 10 8 3.0 * 10^8 3.0 ∗ 1 0 8
f I F = S ∗ 2 ∗ d / c = > d = f I F ∗ c 2 ∗ S f_{IF} = S * 2 * d / c => d = \frac{f_{IF} *c }{2 * S} f I F = S ∗ 2 ∗ d / c => d = 2 ∗ S f I F ∗ c
1.2.1 最大距离
最大距离取决于,IF信号的最大频率 f I F _ m a x f_{IF\_max} f I F _ ma x
1.2.2 距离分辨率
距离分辨率,同样取决于f I F f_{IF} f I F
傅里叶变换的频率分辨率与采样时间T c T_c T c Δ f = 1 / T c \Delta f = 1/T_c Δ f = 1/ T c
Δ f I F = S ∗ 2 ∗ Δ d / c > = 1 / T c = > Δ d > = c 2 ∗ S ∗ T c \Delta f_{IF} = S * 2 * \Delta d / c >= 1/T_c => \Delta d >= \frac{c}{2 * S *T_c}
Δ f I F = S ∗ 2 ∗ Δ d / c >= 1/ T c => Δ d >= 2 ∗ S ∗ T c c
式中S S S T c T_c T c S ∗ T C = B S * T_C = B S ∗ T C = B
综上,距离分辨率:
Δ d = c 2 ∗ B \Delta d = \frac{c}{2 * B}
Δ d = 2 ∗ B c
可以知道,距离分辨率与带宽成反比,带宽越高,距离分辨率越小。
1.3、速度
根据多普勒效应,机械波满足如下公式,其中:f ′ f' f ′ f f f v v v v 0 v_0 v 0 v s v_s v s
f ′ = ( v + − v 0 v − + v s ) f f' = (\frac{v +- v_0}{v-+v_s})f f ′ = ( v −+ v s v +− v 0 ) f
但对于电磁波,多普勒效应更加复杂,且物体的运动速度一般相对光速几乎可忽略不计,因此不易通过频率频率获取目标速度。
速度的估算,正如基本原理所介绍的那样,是通过测量距离的变化估算的。
距离的变化,可以通过相位判断。对速度估算,需要发射一组N个等间隔的线性调频脉冲(chirp),称为帧(Frame) ,通过分析一帧内每个chirp的相位变化,估算速度。
距离变化与相位变化的关系: 最简单的假设,一个初始相位为0的毫米波波射向距离为0的物体,回波的相位也是0,射向距离1/8波长的物体,回波的相位是 2 ∗ 1 / 8 ∗ 2 π 2 * 1/8 * 2π 2 ∗ 1/8 ∗ 2 π t 0 t0 t 0 t 0 + T c t0 + T_c t 0 + T c d + Δ d d+Δd d + Δ d
又因为 Δ d = v ∗ T c \Delta d = v * T_c Δ d = v ∗ T c
Δ ω = 2 ∗ v ∗ T c λ ∗ 2 π = 4 π ∗ v ∗ T c λ = > v = Δ ω ∗ λ 4 π ∗ T c Δω = \frac{2 * v* T_c }{\lambda} * 2\pi = \frac{4\pi * v * T_c}{\lambda} => v = \frac{Δω * \lambda}{4\pi * T_c}
Δ ω = λ 2 ∗ v ∗ T c ∗ 2 π = λ 4 π ∗ v ∗ T c => v = 4 π ∗ T c Δ ω ∗ λ
1.3.1 最大速度
最大速度取决于最大相位角,为了不造成歧义,约定 ∣ Δ ω ∣ < π |Δ\omega|<π ∣Δ ω ∣ < π
所以有:∣ Δ ω ∣ = ∣ 4 π ∗ v ∗ T c λ ∣ < π = > v < λ 4 T c |Δ\omega| = |\frac{4\pi * v * T_c}{\lambda}| < \pi => v< \frac{λ}{4T_c} ∣Δ ω ∣ = ∣ λ 4 π ∗ v ∗ T c ∣ < π => v < 4 T c λ
即物体运动的最大速度不能超过λ 4 T c \frac{λ}{4T_c} 4 T c λ λ \lambda λ T c T_c T c T c T_c T c
1.3.2 速度分辨率
速度分辨率同样取决于相位角频率 Δ ω \Delta \omega Δ ω
快速傅里叶变换的分辨率:对于离散的相位角频率满足 Δ ω > = 2 ∗ π / M ( r a d i a n s / s a m p l e s ) \Delta \omega >= 2 * \pi /M(radians/samples) Δ ω >= 2 ∗ π / M ( r a d ian s / s am pl es ) Δ ω > = 1 / M ( c y c l e s / s a m p l e ) \Delta \omega >= 1/M (cycles/sample) Δ ω >= 1/ M ( cy c l es / s am pl e )
可以看出离散数据的分辨率,和连续数据的分辨率形式上是非常相似的(Δ f = 1 / T c \Delta f = 1/T_c Δ f = 1/ T c
速度分辨率推导过程:
$\Delta \omega = 2*\pi / M => \frac{4\pi * v * T_c}{\lambda} = 2*\pi / M => v = \frac{\lambda}{4\pi * T_c * M} = \frac{\lambda}{2 * T_f} $
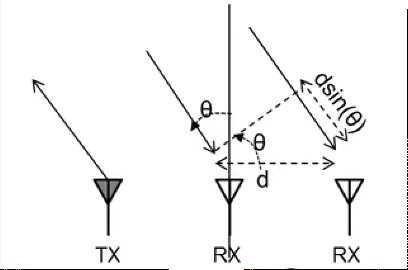
1.4、角度
角度的测量需要多个接收雷达,根据不同接收雷达接收信号的的微小距离差来评估角度。如下图所示,假设物体足够远(一般来说相对雷达的间距是足够远的)。发射雷达TX发射信号,接收雷达RX接收回波信号。RX1与RX2接收的信号是近似平行的。因此两者的信号传播距离差可以表示为:
Δ d = d s i n ( θ ) \Delta d = dsin(\theta) Δ d = d s in ( θ )
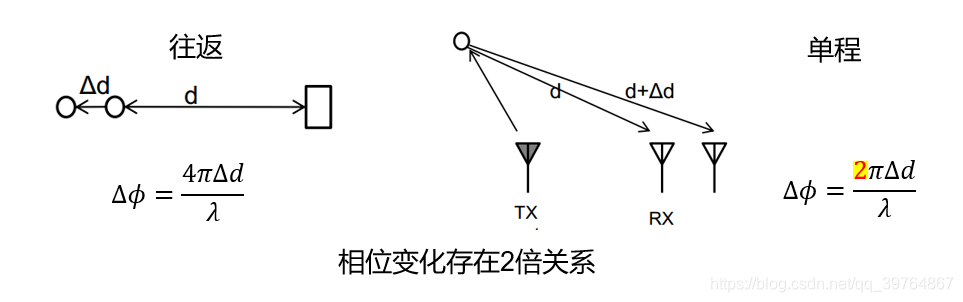
由上一节速度评估的分析可知,距离差和相位之间相关。
这里距离与相位的关系为:
Δ ϕ = 2 π Δ d λ \Delta \phi = \frac{2\pi \Delta d} {\lambda} Δ ϕ = λ 2 π Δ d
可以看到测角与测速的相位变化:Δ ϕ = 4 π Δ d λ \Delta \phi = \frac{4\pi \Delta d} {\lambda} Δ ϕ = λ 4 π Δ d
带入可得:
Δ ϕ = 2 π Δ d λ = 2 π d s i n ( θ ) λ \Delta \phi = \frac{2\pi \Delta d} {\lambda} = \frac{2\pi dsin(\theta)} {\lambda} Δ ϕ = λ 2 π Δ d = λ 2 π d s in ( θ )
即:θ = a r c s i n ( λ ∗ Δ ϕ 2 π d ) \theta = arcsin(\frac{\lambda*\Delta \phi}{2\pi d}) θ = a r cs in ( 2 π d λ ∗ Δ ϕ )
1.4.1最大角度
与最大速度类似,最大角度取决于两个雷达之间的最大相位角,为了不造成歧义,约定 ∣ Δ ϕ ∣ < π |Δ\phi|<π ∣Δ ϕ ∣ < π
∣ Δ ϕ ∣ = 2 π d s i n ( θ ) λ < π = > ∣ θ ∣ < a r c s i n ( λ 2 d ) |\Delta \phi| = \frac{2\pi dsin(\theta)} {\lambda} < \pi => |\theta| < arcsin(\frac{\lambda}{2d}) ∣Δ ϕ ∣ = λ 2 π d s in ( θ ) < π => ∣ θ ∣ < a r cs in ( 2 d λ )
一般毫米波雷达的间距 d = λ / 2 d = \lambda/2 d = λ /2 ∣ θ ∣ < π / 2 |\theta| < \pi/2 ∣ θ ∣ < π /2
雷达的最大可视角度为 正负 90度。
1.4.2 角度分辨率
角度分辨率也和速度分辨率类似,由于可能存在多个物体导致回波叠加,因此同样需要使用快速傅里叶变换对回波信号进行处理。而这里也是离散信号,采样点是接收雷达RX的个数。在速度估算时,我们说过离散信号的分辨率取决与采样点的个数,所以这里相位分辨率为:
Δ ϕ > 2 π / N \Delta \phi > 2\pi/N Δ ϕ > 2 π / N
所以:
$\Delta \phi = \frac{2\pi dsin(\theta)} {\lambda} > 2\pi/N => \theta > arcsin(\frac{\lambda}{Nd}) => \theta > arcsin(\frac{2}{N}) $
上式Nd,就是雷达阵列的宽度,可见当波长一定时,雷达的角分辨率与雷达阵列尺寸有关,分辨率越大,需要的雷达阵列的尺寸就越大。由于一般 d = λ / 2 d = \lambda/2 d = λ /2
2 德州仪器(TI) 产品使用
2.1 MIMO雷达
2.2 AWR 2243
2.3 DCA 1000
2.4 mmWave Studio
3 雷达数据的处理
3.1、格式处理
TI公司的毫米波雷达通常使用DCA 1000 或 TSW 1400进行数据采集,这里主要分析DCA 1000采集的数据格式。
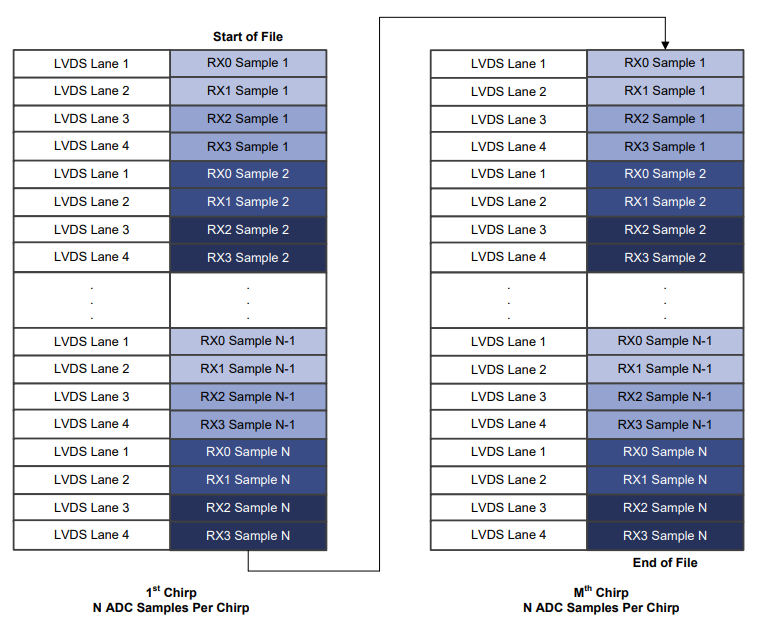
3.1.1 使用DCA 1000采集的xWR12xx或xWR14xx实数数据格式
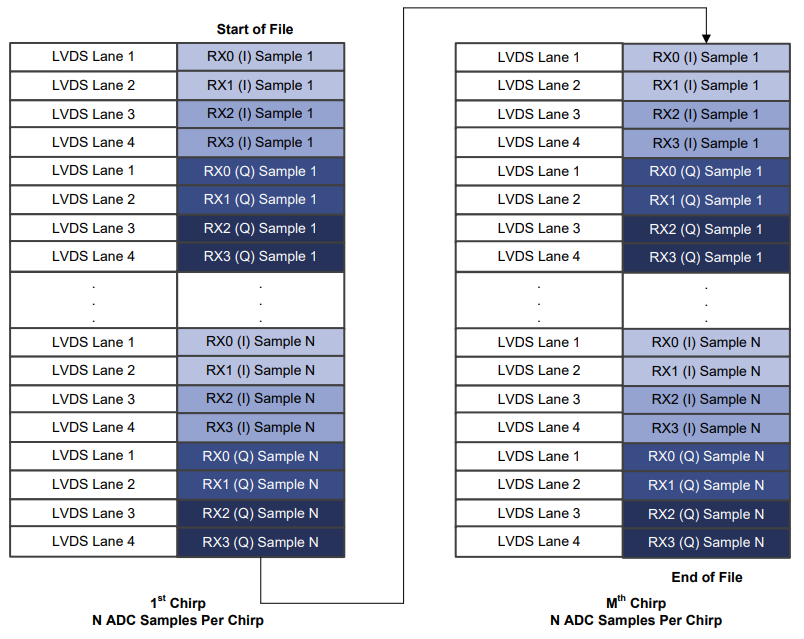
3.1.2 使用DCA 1000采集的xWR12xx或xWR14xx复数数据格式
matlab行优先
python列优先
返回:(numLoopsPerFrame * numTxAntennas, numRxAntennas, numRangeBins)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 def organize2243 (raw_frame, num_chirps, num_rx, num_samples ): """Reorganizes raw ADC data into a full frame Args: raw_frame (ndarray): Data to format num_chirps: Number of chirps included in the frame num_rx: Number of receivers used in the frame num_samples: Number of ADC samples included in each chirp Returns: ndarray: Reformatted frame of raw data of shape (num_chirps, num_rx, num_samples) """ ret = np.zeros(len (raw_frame) // 2 , dtype=complex ) ret[0 ::4 ] = raw_frame[0 ::8 ] + 1j * raw_frame[4 ::8 ] ret[1 ::4 ] = raw_frame[1 ::8 ] + 1j * raw_frame[5 ::8 ] ret[2 ::4 ] = raw_frame[2 ::8 ] + 1j * raw_frame[6 ::8 ] ret[3 ::4 ] = raw_frame[3 ::8 ] + 1j * raw_frame[7 ::8 ] ret = ret.reshape((num_chirps, num_samples, num_rx)) ret = np.swapaxes(ret, 1 , 2 ) return ret.reshape((num_chirps, num_rx, num_samples))
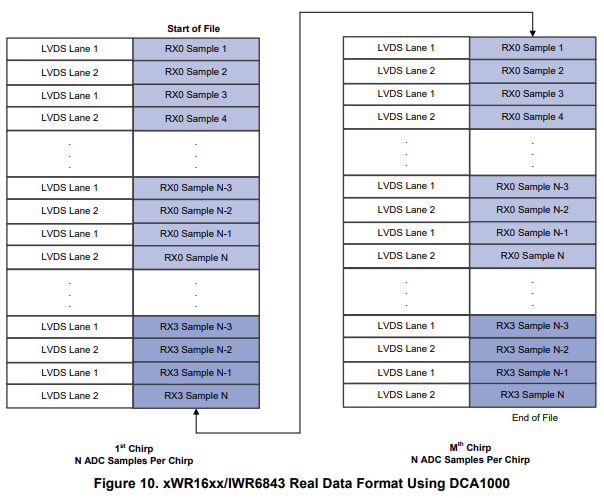
3.1.3 使用DCA 1000采集的xWR16xx或IWR6843实数数据格式
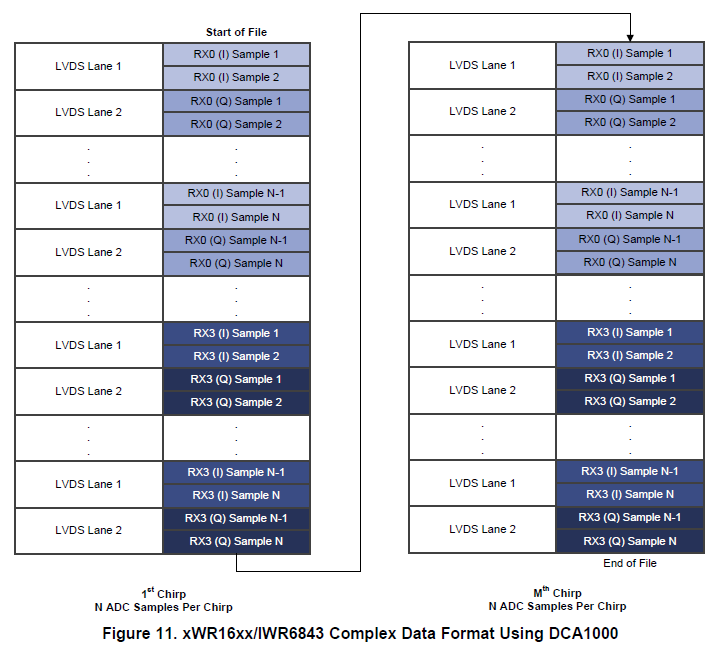
3.1.3 使用DCA 1000采集的xWR16xx或IWR6843复数数据格式
返回:(numLoopsPerFrame * numTxAntennas, numRxAntennas, numRangeBins)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 def organize (raw_frame, num_chirps, num_rx, num_samples ): """Reorganizes raw ADC data into a full frame Args: raw_frame (ndarray): Data to format num_chirps: Number of chirps included in the frame num_rx: Number of receivers used in the frame num_samples: Number of ADC samples included in each chirp Returns: ndarray: Reformatted frame of raw data of shape (num_chirps, num_rx, num_samples) """ ret = np.zeros(len (raw_frame) // 2 , dtype=complex ) ret[0 ::2 ] = raw_frame[0 ::4 ] + 1j * raw_frame[2 ::4 ] ret[1 ::2 ] = raw_frame[1 ::4 ] + 1j * raw_frame[3 ::4 ] return ret.reshape((num_chirps, num_rx, num_samples))
分离TX数据
(numLoopsPerFrame * numTxAntennas, numRxAntennas, numRangeBins) -> (numLoopsPerFrame, numTxAntennas * numRxAntennas, numRangeBins)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 def separate_tx (signal, num_tx, vx_axis=1 , axis=0 ): """Separate interleaved radar data from separate TX along a certain axis to account for TDM radars. 从单独的TX沿某一轴将交错的雷达数据分离,以描述TDM雷达。 Args: signal (ndarray): Received signal. (numChirpsPerFrame, numRxAntennas, numRangeBins) num_tx (int): Number of transmit antennas. vx_axis (int): Axis in which to accumulate the separated data. 用于累积分离数据的轴。 axis (int): Axis in which the data is interleaved. 数据交错的轴。 Returns: ndarray: Separated received data in the """ reordering = np.arange(len (signal.shape)) reordering[0 ] = axis reordering[axis] = 0 signal = signal.transpose(reordering) out = np.concatenate([signal[i::num_tx, ...] for i in range (num_tx)], axis=vx_axis) return out.transpose(reordering)
3.2、距离
1 2 3 4 fft1d_in = np.hamming(frame.shape[-1 ]) rangeBins = np.fft.fft(fft1d_in, axis=2 )
3.3、速度
1 2 3 4 5 6 fft2d_in = np.transpose(rangeBins, axes=(2 , 1 , 0 )) fft2d_in = np.hamming(fft2d_in.shape[-1 ]) fft2d_out = np.fft.fft(fft2d_in, axis=-1 ) fft2d_out = np.fft.fftshift(fft2d_out, axes=-1 ) range_doppler = np.transpose(fft2d_out, axes=(2 , 1 , 0 )) range_doppler = range_doppler[:, 0 , :]
3.4、角度
1 2 3 4 5 6 7 8 9 10 11 12 13 dopplerBins = aoa_input padding = ((0 , 0 ), (0 , numAngleBins-dopplerBins.shape[1 ]), (0 , 0 )) range_azimuth = np.pad(dopplerBins, padding, mode='constant' ) """ 数组填充: 填充的数组:dopplerBins 填充的形状:padding 填充模式:constant 常量填充,默认0 """ print (range_azimuth.shape)range_azimuth = np.fft.fft(range_azimuth, axis=1 )
4 信号处理相关算法
4.1 杂波去除
4.2 目标检测
4.3 目标追踪
参考连接:
相机数据是结构化的高分辨率图像数据,毫米波雷达原始数据则是角分辨率很低且没有高程信息的稀疏点云,这二者原始数据很难融合成一套输入给到神经网络模型,因此目前绝大多数方案都是使用后融合(松耦合)方案。